
Zhi Yan (Ian) Leong :)
YOU FOUND ME! Lowkey trying to show-off my projects so enjoy….I guess.
Quick About Me
Born and raised in Malaysia but currently in the US. I graduated with a bachelors in Electrical Engineering (Spring 2020) where a pandemic robbed my convocation. Wondering where I’ll be next.
Since I was a kid, I’ve always been fascinated by the tech world. A life-long learner to push my limits and excited to see what the world can achieve together. Passionate moving forward into an AV and AI world.
Outside of work, I love outdoor activities such as kayaking and hiking. Active player in many sports, played competitively especially in squash and racquetball.
Fluent in English, Malay, Mandarin, and Cantonese.
Enough about me, I’d love to get to know you. Schedule a meeting with me!
Projects
Here is a list of the projects:
- CarND Capstone
- Path Planning
- PID Control
- Kidnapped Vehicle
- Extended Kalman Filter
- Behavioral Cloning
- Traffic Sign Classifier
- Advance Lane Finding
- Route Planner A* Search
- Sensing Movement Histogram Filter 2D
- Traffic Light Classifier
- Finding Lane Lines
- Reconstruction Trajectories
- Kalman Filter with Matrix Class
- Joy Ride Parallel Parking
- Sensing Movement Bayes Theorem 1D
Project Descriptions
CarND Capstone
- System integration was used for the vehicle to follow waypoints using Pure Pursuit and detect traffic lights for action decision as necessary.
 vehicle following waypoints and obeying traffic lights.
vehicle following waypoints and obeying traffic lights.
Path Planning
- Using the process of prediction, behavior, and trajectory to safely navigate around a virtual highway with other traffic that is driving +-10 MPH of the 50 MPH speed limit
 path planning algorithm where the car navigates on a highway.
path planning algorithm where the car navigates on a highway.
PID Control
- Implement a PID controller to control a car in a simulator with twiddle algorithm for auto-tuning parameters
 PID controller for car completing a lap on track.
PID controller for car completing a lap on track.
Kidnapped Vehicle
- Implement localization through a 2D particle filter in C++
 result of the localization process through the particle filter.
result of the localization process through the particle filter.
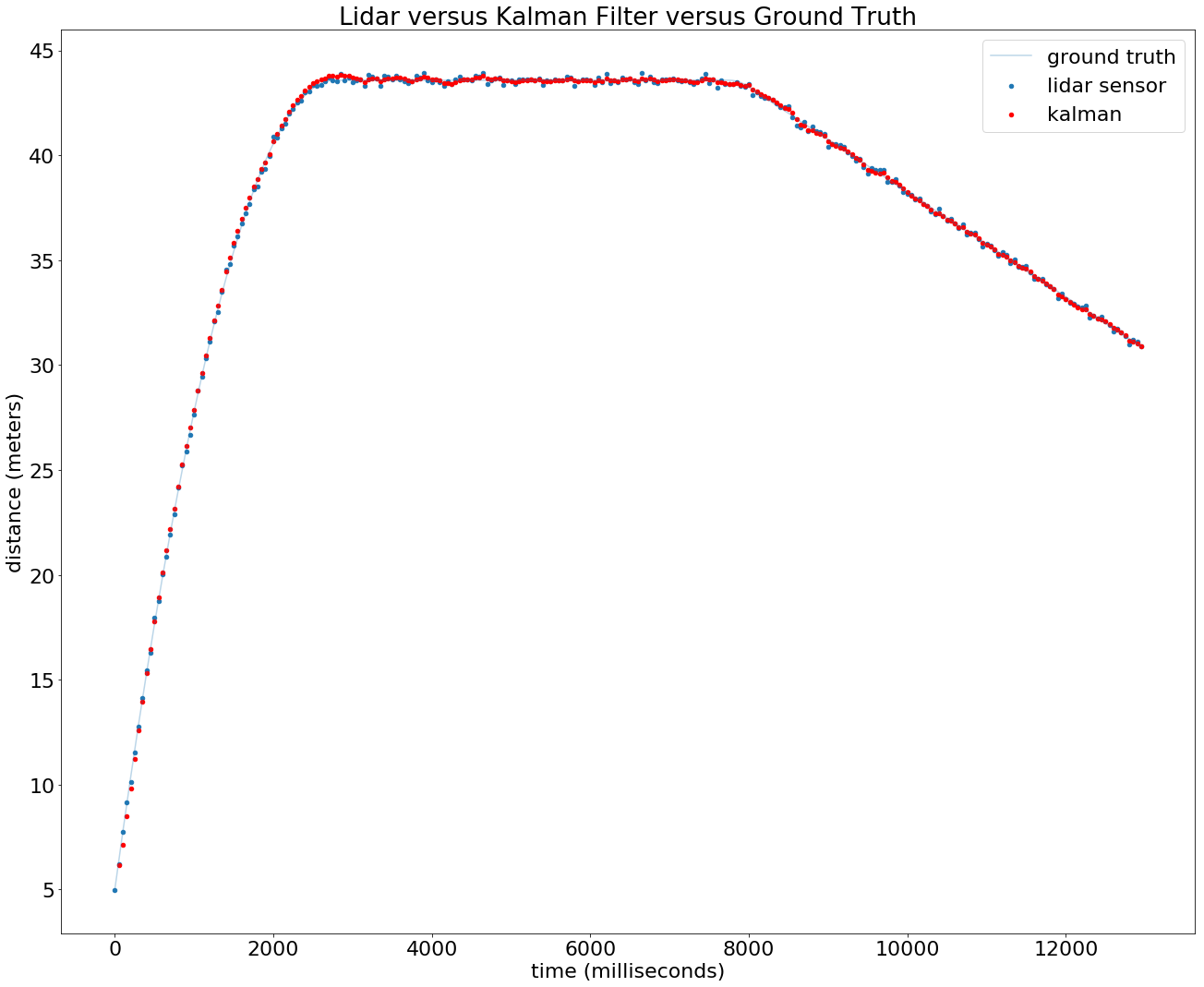
Extended Kalman Filter
- Using kalman filter to estimate the state of a moving object of interest with noisy lidar and radar measurements
 result of the implementation of EKF with low RSME value.
result of the implementation of EKF with low RSME value.
Behavioral Cloning
- Using deep neural networks and convolutional neural networks to clone driving behavior
 birds-eye view of CNN model to output a steering angle to an autonomous vehicle at its max speed setting (~30mph).
birds-eye view of CNN model to output a steering angle to an autonomous vehicle at its max speed setting (~30mph).
Traffic Sign Classifier
- Using LeNet-5 (Deep Learning) to build a Traffic Sign Recognition Classifier
 traffic sign image obtained from the web and evaluated using our trained model.
traffic sign image obtained from the web and evaluated using our trained model.
Advance Lane Finding
- Using images/video (Computer Vision) to build a lane finding algorithm
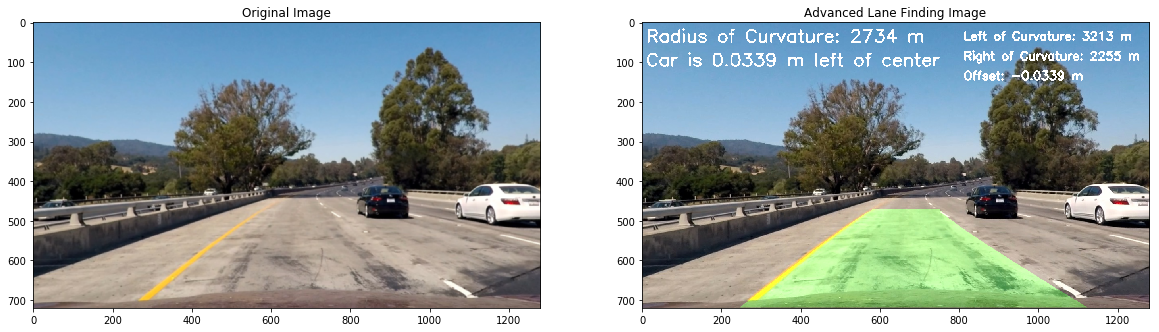 algorithm successfuly drawing on detected lane
algorithm successfuly drawing on detected lane
Route Planner A Star Search
- Using A* search algorithm to implement a ‘Google-maps’ route planning algorithm
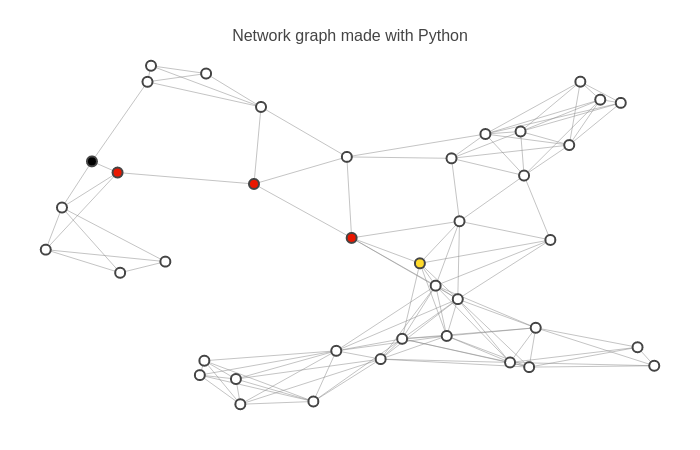 Black Dot: Starting point; Red Dot: Path taken; Yellow Dot: Destination Point
Black Dot: Starting point; Red Dot: Path taken; Yellow Dot: Destination Point
Sensing Movement Histogram Filter 2D
- 2D histogram filter with sence and move function for a car in Python, C++ and Optimized C++
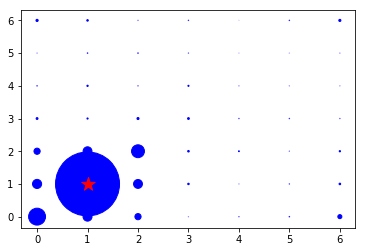 sense function
sense function
Traffic Light Classifier
- Using openCV to classify red,yellow,green with accuracy >90% and never classify red as green
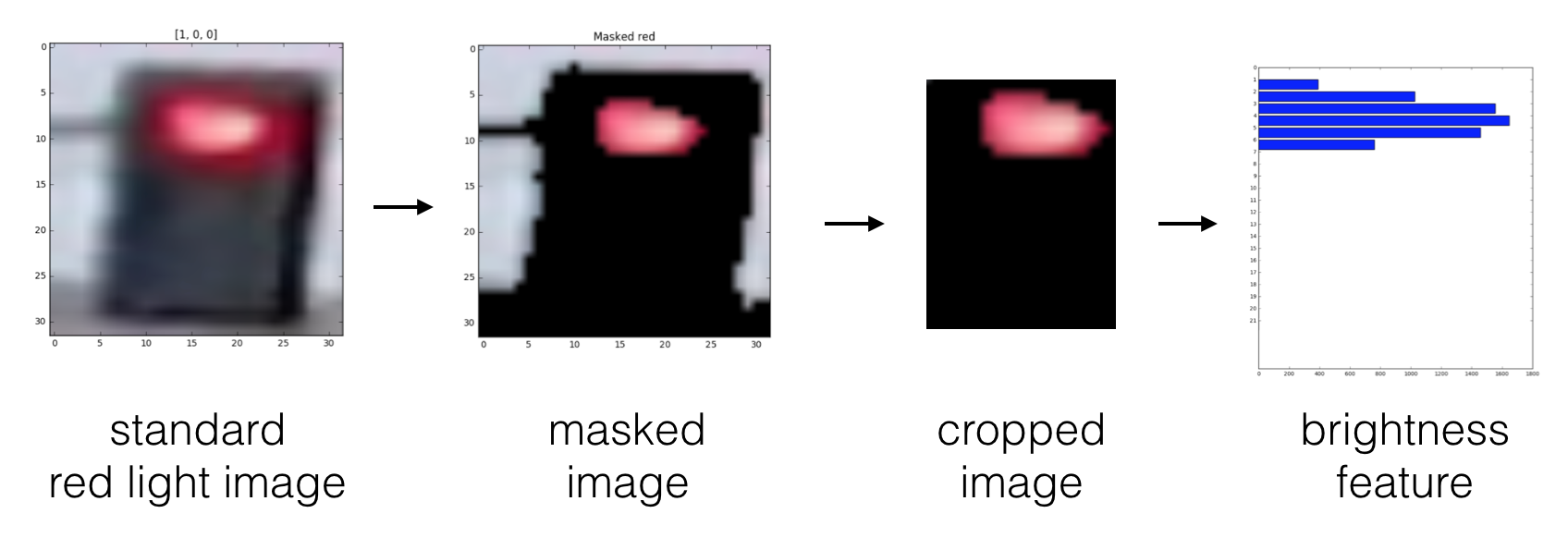 example of the process
example of the process
Finding Lane Lines
- Using masking, canny edge detection, and hough transformation to detect lane lines
 lane lines detected
lane lines detected
Reconstruction Trajectories
- Use raw acceleration, displacement, and angular rotation data from a vehicle’s sensory data to plot trajectory
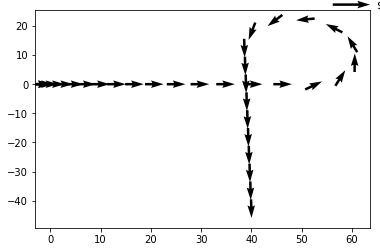 example of accelerating and then turn 270 degrees left
example of accelerating and then turn 270 degrees left
Kalman Filter with Matrix Class
- Kalman filter implemented based on matrix class functions such as addition, subtraction, transpose, multiplication, determinant etc
 visualization of the Kalman filter
visualization of the Kalman filter
Joy Ride Parallel Parking
- A simple program to parallel park based on steering angles, forward, reverse motions
 example of function execution
example of function execution
Sensing Movement Bayes Theorem 1D
- Writing a simple sense and move program for a car based on Bayes Theorem in C++